01、学校招生要求

香港理工大学航空航天工程专业博士生招生要求严格,申请者需满足以下条件:
1. 学术背景要求:
·申请者需具备相关专业的硕士或学士学位
·本科成绩优异,一般要求GPA达到3.2/4.0以上
·在学术研究领域有突出表现
2. 英语能力要求:
·IELTS成绩不低于6.5分
·TOEFL iBT成绩不低于80分
·英语测试成绩有效期为考试日期后两年内
3. 研究能力与领导力:
·具备优秀的研究潜力和创新能力
·良好的沟通与人际交往能力
·具有一定的领导能力和社会责任感
4. 申请材料:
·完整的入学申请表
·学术成绩单与证书
·研究计划或学习计划
·发表的研究论文、获奖证明或其他学术成就证明
·推荐信
·个人简历
5. 奖学金种类:
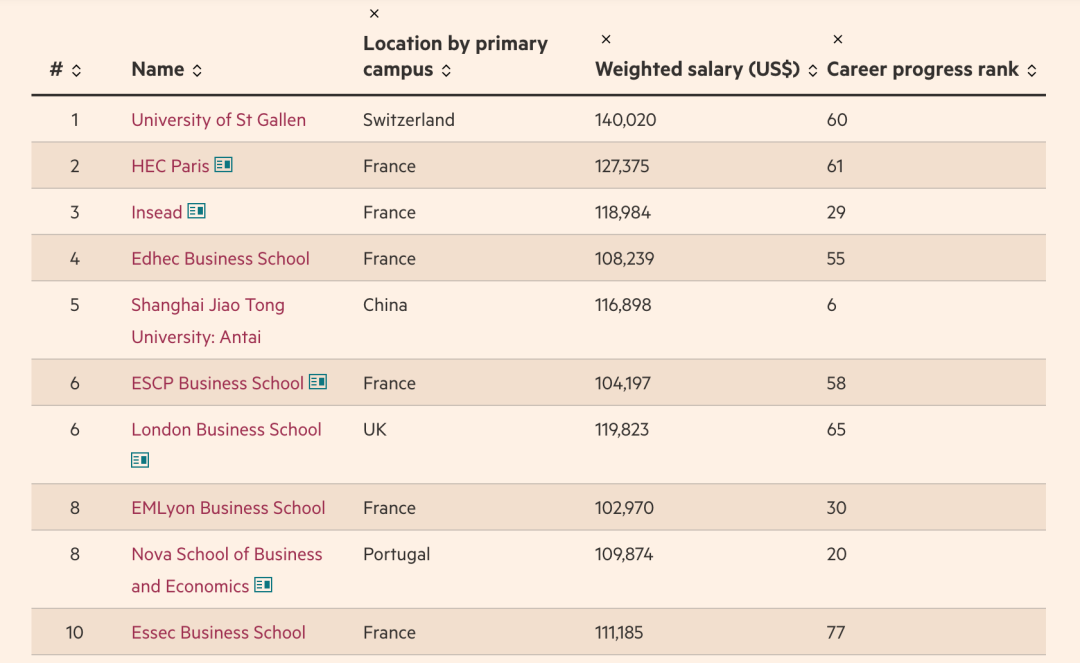
·香港博士研究生奖学金计划(HKPFS):年度津贴约HK$337,200,外加年度会议和研究相关旅行津贴HK$14,000
·香港理工大学校长博士奖学金计划(PPPFS):津贴水平与HKPFS相当,总额约HK$1.63百万
·国际博士奖学金计划(IPFS):为高水平国际学生提供全面资助
02、教授研究方向

温志湧教授(Prof. Chih-Yung WEN)现任香港理工大学航空及民航工程学系讲席教授,同时担任自主无人系统研究中心主任和体育科技研究院副院长。他获得过多项学术荣誉,包括美国机械工程师学会会士(Fellow of ASME)、英国皇家航空学会会士(Fellow of RAeS)、香港工程师学会会士(Fellow of HKIE)以及美国航空航天学会副会士(Associate Fellow of AIAA)等。
温教授的主要研究方向包括:
1.高速流体力学与气动热力学:
·超音速/高超音速飞行器的气动热力学与边界层转捩控制
·冲击波与液滴/气泡相互作用研究
·非平衡流动分析与模拟
·爆轰机理解释与精确模拟
2.等离子体驱动器应用研究:
·介电阻挡放电(DBD)等离子体驱动器在流动控制中的应用
·三角翼前缘涡流控制技术
·飞行器机动性能改善
3.无人机与微型飞行器技术:
·全自主无人机系统开发
·基于摄像头的目标检测与定位系统
·无人机通信中继解决方案
·倾转式垂直起降无人机(TVOL UAV)
·四翼拍打式微型飞行器自主控制
4.应用场景研究:
·基础设施检测技术(桥梁、民航客机外观、高耸楼房)
·水下基础设施检测技术
·危险环境搜救任务
温教授领导的研究团队已建立了数值模拟与实验平台,其自主研发的CFD方法在模拟可压缩单流体和多流体问题中表现出色,能够准确捕捉冲击波和接触间断面。此外,团队还开发了带阴影图成像系统的激波管,为高速流动研究提供了可靠的实验平台。
03、创新研究想法
基于温志湧教授的研究方向,以下是几个潜在的创新研究计划:
1.高超音速飞行器智能边界层转捩控制系统
·研究思路:将机器学习算法与传统边界层控制方法相结合,开发自适应控制系统
·创新点:利用神经网络预测边界层不稳定性,通过主动加热/冷却带和微型等离子体驱动器实时调整边界层流动
·应用前景:可显著提高高超音速飞行器的气动性能和热防护能力,为未来高超音速飞行器设计提供新思路
2.基于多传感器融合的水下无人航行器(UUV)路径规划与避障系统
·研究思路:整合声纳、光学和惯性传感器数据,开发适用于复杂水下环境的实时导航系统
·创新点:提出基于动态概率图模型的决策框架,结合模型预测控制实现高精度轨迹跟踪
·应用前景:可用于水下基础设施检测、海洋资源勘探和海洋科学研究,提高UUV在复杂环境中的自主性和可靠性
3.倾转旋翼-固定翼混合无人机的气动优化与控制
·研究思路:针对过渡阶段气动特性和控制难点进行深入研究,开发新型控制算法
·创新点:采用计算流体动力学与飞行动力学耦合分析,建立转换过程中的非线性模型,设计鲁棒控制策略
·应用前景:解决垂直起降与巡航效率之间的矛盾,为城市空中交通和长距离任务提供更高效的解决方案
4.爆轰波与材料相互作用的多尺度模拟方法
·研究思路:从分子动力学到连续介质力学建立多尺度计算框架,研究爆轰波对不同材料的作用机理
·创新点:考虑振动非平衡效应,整合量子力学计算和流体力学模拟,实现更准确的爆轰预测
·应用前景:为超/高超声速推进系统设计和爆轰发动机开发提供理论基础
【竞赛报名/项目咨询+微信:mollywei007】